アセットコルサで一般車も走る首都高MODを導入しました。今回紹介するのはDiscordにて配布されている設定が簡単といわれている
SRP 0.9.1 Shibaura Traffic
を使用した2024年4月時点で動作OKだったファイルの一覧を紹介します「Traffic for SRP」では無いのでご注意を
下記サイトでコンテンツマネージャーをインストールし起動(MODを使う時はこれ必須)
Content Manager - alternative launcher for Assetto Corsa
次にレコメンド(推奨版)CSPファイルをダウンロードしてコンテンツマネージャー画面にドラッグアンドドロップするとインストールされます以降のMODも同じ手順(ドラッグ)でOKです
・lights-patch-v0.1.7.9
Custom Shaders Patch

設定で0.1.79をチェック。勝手に更新されないようにロックしておきます
インストール方法です。上記のようにMODファイルをドラッグすると管理セクションタブが緑になります。そこをクリックすると

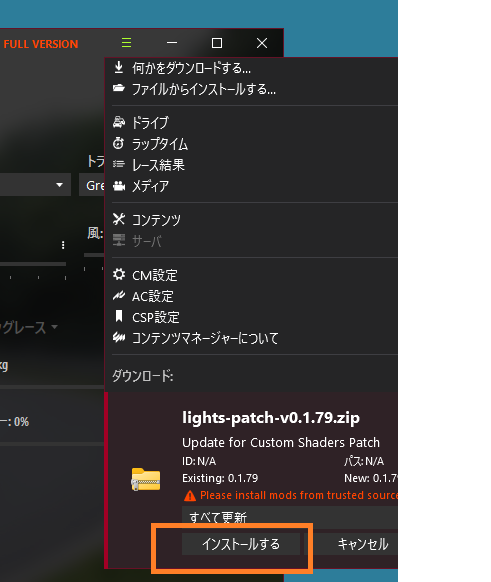
インストールするをクリック

インストールが成功しましたと表示されればインストール完了。他のMODファイルも同じ手順でインストール
以下3ファイルを入手してコンテンツマネージャーにドラッグしてインストール
・SOL 2.2.9
OVERTAKE.GGから入手
Sol | OverTake (Formerly RaceDepartment)
インストール後、使用アプリにチェック!(Solの導入等で調べて)
・SRP 0.9.1ShibauraTrafficFixed
・SRP_Car_Pack_3.2+Traffic_Cars_1.21
上記2ファイルはDiscordから入手
Discord | Your Place to Talk and Hang Out
インストールが終わったらトラフィック車の速度を設定します。これ行わないと止まったままのオブジェです。
次にダウンロードしたSRPzipフォルダを開きます(インストールしたファイルの中ではないですよ)


optional different speed Aiを開きます

ここで3つのファイルが出てきましたこのファイルはAi車が走るスピードを3段階で選べるようにしてあるのですがこの設定が有る事に気付かずAi車が走らない!と悩む方が多いみたいです(自分もその一人でしたREADMEは読みましょうね)今回は走行速度70㎞のslowerでの設定例です。(fasterフォルダを使えばAi車が150㎞で走行)このフォルダも開きます

此のai_hintsファイルをアセットコルサをインストールした
C:\Program Files (x86)>Steam>steamapps>common>
assettocorsa>content>tracks>shuto_revival_project_beta>
shibaura_pa_traffic>dataフォルダにコピーします

この状態になっていればOK コース選択でShibaura_Pa_traffic・ 走行会・Ai車達を登録し時間を夜間にしてヘッドライトをONすれば

取り敢えずこのファイルの組み合わせで動いた例として参考になればと。MODは種類やバージョンによる相性があるので最初に基本状態を確立してから色々試したほうが良いかと思います。
どのハンコンもブレーキペダルはかなり重いのでデスクトップ環境でペダルと椅子がしっかり固定出来ない場合はMODスプリングに交換。フィーリングがどうのこうのとかレースマシンのペダルだとか以前にゲームになりませんから


 ハンコン G923d グランツーリスモ7 動作確認済み PS5 PS4 PC ハンドル コントローラー レーシング ゲーム フォースフィードバックシステム ステアリング 国内正規品 1年間メーカー保証 ※Amazon限定の壁紙ダウンロード付き ブラック")
")





0.2~0.5口径対応 フラッグシップモデル 小型 プラモ 模型 塗装 アート")


![かなへび (かがくのとも絵本) [ 竹中践 ]](https://thumbnail.image.rakuten.co.jp/@0_mall/book/cabinet/5457/9784834085457.jpg?_ex=128x128 "かなへび (かがくのとも絵本) [ 竹中践 ]")
![TRACERLINE Dye-Lite TP3400-0601 1本 トレーサーライン オイル用蛍光剤 UV 紫外線 [並行輸入品]](https://m.media-amazon.com/images/I/31Hw5nTzzlL._SL500_.jpg "TRACERLINE Dye-Lite TP3400-0601 1本 トレーサーライン オイル用蛍光剤 UV 紫外線 [並行輸入品]")
")










